
Helikopter Aufbau, Aerodynamik und Steuerung
Wie fliegt ein Helikopter? Auf dieser Seite zeigen wir Ihnen wie ein Helikopter aufgebaut ist und wie er fliegt. Dies sind wichtige Voraussetzungen vor Ihrem ersten Schnupperflug. Die Informationen sind in verschiedene Bereiche aufgeteilt.

Wie kann ich einen Helikopter selber fliegen
1. Helikopter Rotorsystem



Gelenkige Rotoren
Die Rotorblätter der ersten Helikopter waren starr mit der Rotorwelle verbunden. Dies hat zu einer unkontrollierbaren Rollbewegung im Vorwärtsflug geführt, da das vorlaufende Rotorblatt durch die grössere Anströmgeschwindigkeit mehr Auftrieb liefert als das Rücklaufende. Das führte aber immer wieder zu Problemen bis hin zum Absturz. Der erste der die Schlag- und Schwenkgelenke eingeführt hat, war Juan de la Cierva bei seinen Autogiros.
Die heutigen modernen Rotorsysteme kann man in folgende Kategorien einteilen:
- gelenkige Rotoren
- gelenklose Rotoren
- lagerlose Rotoren
Die gelenkigen Rotorsysteme verfügen über mechanische Schlag- und Schwenkgelenke, sowie ein Lager für die Verstellung des Einstellwinkels des Rotorblattes (Abb. 1). Diese Gelenke sind sehr wartungsintensiv und dadurch teuer im Unterhalt.
Gelenklose Rotoren
Beim gelenklosen Rotorsystem werden die mechanischen Schlag- und Schwenkgelenke durch entsprechend flexible Materialien an der Blattwurzel ersetzt, welche die Schlag- und Schwenkbewegung erlauben (Abb. 2). Dies wurde erst möglich mit der Einführung von Kunststoffen. Der BO-105 war der erste Helikopter mit einem solchen Rotorsystem.
Lagerlose Rotoren
Der lagerlose Rotor hat keine mechanischen Schlag- und Schwenkgelenke und auch das Lager für die Verstellung des Einstellwinkels wird durch ein Elastomerlager ersetzt. Da keine herkömmlichen mechanischen Lager verwendet werden, kann der Unterhalt wesentlich reduziert werden. An der Rotorblattwurzel wirken sehr grosse Kräfte, aus diesem Grund ist der lagerlose Rotor mit Elastomerlager nur für kleinere Helikopter geeignet. Dieses System wurde durch Aerospatial mit dem Spheriflex Rotor verwirklicht.
In die Gruppe der gelenkigen Rotorsysteme kann auch das halbstarre System eingeteilt werden (Abb. 3). Dieses Verfahren wird nur bei Helikoptern mit zwei Rotorblättern angewendet. Die beiden Rotorblätter sind über eine Art Wippe mit dem Rotormast verbunden, was die Schlagbewegung erlaubt. Schwenkgelenke werden bei diesem System nicht benötigt.
2. Helikopter Aerodynamik




Aerodynamische Grundlagen
Bevor wir in die Aerodynamik der Helikopter einsteigen können, sollten wir einige grundlegende aerodynamische Prinzipien kennen.
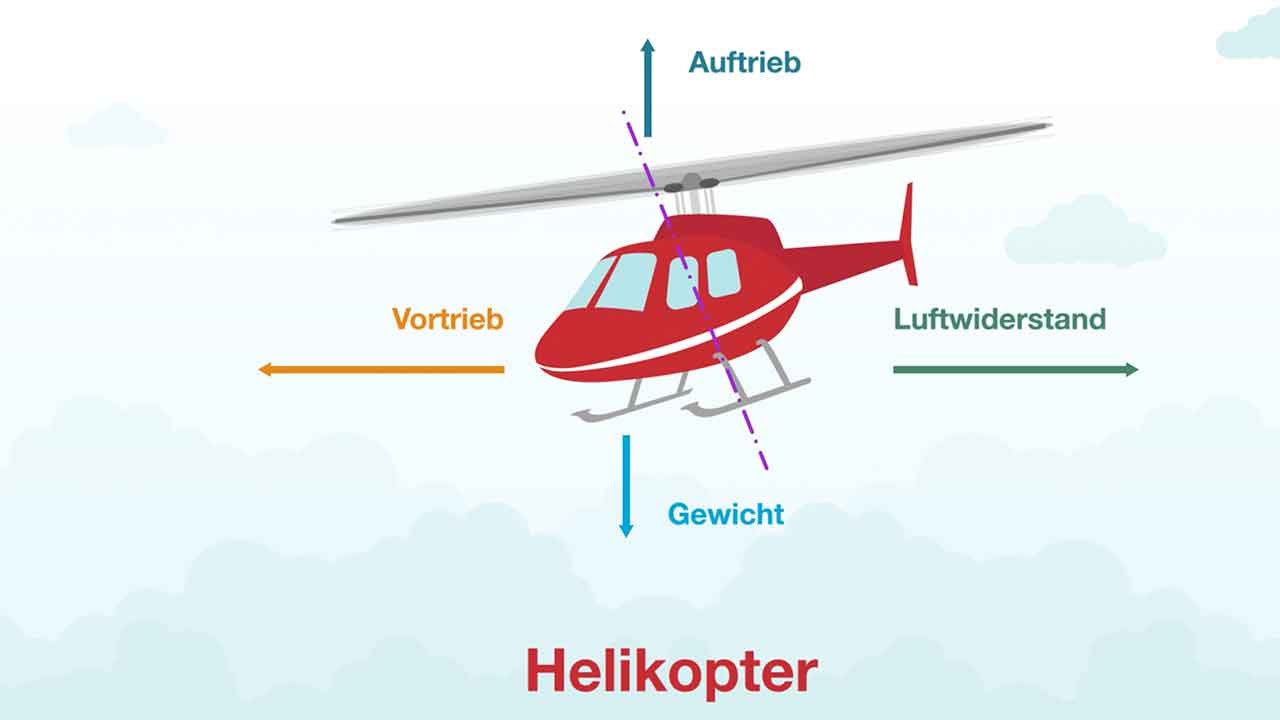
Damit die Flugzeuge, die "schwerer als Luft" sind vom Boden abheben können, muss eine Kraft nach oben wirken, die mindestens so gross ist, wie das Gewicht des Flugzeuges. Diese Kraft nennt man Auftrieb und wird durch die Tragflächen erzeugt.
Antrieb
Die Tragflächen oder Flügel haben im Querschnitt eine bestimmte Form, das Profil. Es gibt eine Vielzahl verschiedener Profilarten, je nachdem welche Flugeigenschaften ein Flugzeug erreichen soll.
Bewegt sich nun eine Tragfläche vorwärts, teilt das Profil den Luftstrom in einen unteren und einen oberen Teil (Abb. 1).
Sogwirkung
Da die Luft durch die Wölbung um das Profil verdrängt wird, muss sie einen "weiteren Weg" zurücklegen, wodurch sich die Strömungsgeschwindigkeit erhöht. Nach dem Gesetz der Strömungslehre (Bernoulli-Gleichung) führt die Geschwindigkeitszunahme zu einer Reduktion des Drucks. Es entsteht auf der Oberfläche des Flügels ein "Sog" (Abb. 2). Da die obere und untere Seite des Profils eine unterschiedliche Wölbung aufweisen, wird auch ein unterschiedlicher "Sog" erzeugt.
Luftwiderstand
Bei einem vollsymetrischen Profil (hier ist ein halbsymmetrisches dargestellt) ist der Unterdruck auf der Flügeloberseite genau gleich gross wie auf der Unterseite.
Diese rein aerodynamischen Kräfte reichen noch nicht aus, um ein Flugzeug zum Fliegen zu bringen. Ein Flügel muss im Luftstrom leicht angestellt werden, wodurch die Luft nach unten abgelenkt wird, was zu einem Überdruck auf der Flügelunterseite führt, welcher den Gesamtauftrieb erhöht (Abb. 3).
Anstellwinkel / Wirbel
Dieser Anstellwinkel bewirkt zusätzlich eine Erhöhung des Unterdrucks auf der Oberseite, da die Luft einen noch weiteren Weg zurücklegen muss und dadurch stärker beschleunigt wird.
Durch die Anstellung des Flügels wird aber auch der Luftwiderstand erhöht, was mit einer grösseren Leistung für den Vortrieb kompensiert werden muss.
Grundsätzlich kann gesagt werden, dass der Auftrieb grösser wird je schneller sich das Flugzeug vorwärts bewegt. Gleichzeitig wird aber auch der Luftwiederstand erhöht. Aus diesem Grund besitzen Flugzeuge welche nur langsam fliegen dicke Profile, bei sehr schnellen Flugzeugen reichen schlanke Profile für die Erzeugung des Auftriebs aus.
Der Anstellwinkel und die Geschwindigkeit können aber nicht beliebig erhöht werden da die Luftströmung auf der Oberseite abreissen kann. Das heisst die Strömung fliesst nicht mehr entlang dem Profil, sondern bildet Wirbel (Abb. 4).
Zuerst entstehen die Wirbel an der Austrittskante. Wird der Anstellwinkel weiter erhöht, bilden sich immer mehr Wirbel Richtung Eintrittskante, bis der Auftrieb nicht mehr ausreicht um das Flugzeug in der Luft zu halten. Dieser Flugzustand wird als Stall (engl.) bezeichnet und tritt vor allem dann auf, wenn das Flugzeug zu langsam fliegt.
Sobald die Strömung wieder sauber am Profil entlang fliesst, ist auch der notwendige Auftrieb wieder vorhanden und das Flugzeug fliegt wieder.
Unterschiede Helikopter - Flugzeug



Flugzeug
Die Helikopter unterscheiden sich ganz grundsätzlich von den Flächenflugzeugen. Zwar wirken auch beim Helikopter aerodynamische Kräfte, die sind aber viel schwieriger zu berechnen und zu erklären als bei einem Flugzeug. Dies vor allem weil beim sich drehenden Rotor zusätzliche Kräfte entstehen, welche bei einem Flächenflugzeug nicht vorhanden sind.
Bei einem Flugzeug mit Flügeln sind die Verhältnisse einigermassen klar. Der Vortrieb wird entweder durch einen Propeller oder ein Düsentriebwerk geliefert (ausser bei einem Segelflugzeug). Der Auftrieb wird durch die Flügel erzeugt und das Ganze wird mit Klappen, Ruder und Leitwerken gesteuert (Abb. 5).
Helikopter
Anders sieht es beim Helikopter aus. Die sich drehenden Rotorblätter erzeugen, ähnlich wie bei einem Flügel, den Auftrieb und beschleunigen die Luft von oben nach unten. Dies geschieht indem bei allen Rotorblättern der Einstellwinkel (Winkel zwischen Rotorblattsehne und Heli-Längsachse) und dadurch auch der Anstellwinkel gleichzeitig erhöht wird. Dies wird als kollektive Blattverstellung bezeichnet. Dadurch wird die Luft, ähnlich wie bei einem Ventilator, nach unten "geblasen", der Gesamtauftrieb wird erhöht und der Helikopter beginnt zu steigen. Damit sich dieses Gefährt nach vorne bewegt, muss "nur" die Rotorebene nach vorne geneigt werden, so dass der Luftstrom durch den Rotor leicht nach hinten "geblasen" wird (Abb. 6).
Helikopter Steuerung
Die Steuerung des Helikopters erfolgt nach dem gleichen Prinzip. Die Rotorebene wird in die Richtung geneigt wohin der Hubschrauber fliegen soll. Dies tönt sehr einfach, ist in Wirklichkeit aber ein sehr komplexer aerodynamischer Vorgang (davon sprechen wir später). Gemeinerweise besagt ein physikalisches Gesetz (von Newton), dass eine Aktion eine Reaktion hervorruft. Dies bewirkt, dass sich der Rumpf des Helikopters entgegen der Drehrichtung des Rotors drehen möchte. Um dies zu verhindern wird bei den meisten Helikoptern ein senkrecht drehender Rotor, der Heckrotor angebracht, welcher dieses Drehmoment ausgleicht (Abb. 7). Mit diesem Heckrotor kann der Helikopter im Schwebeflug um die Hochachse gesteuert werden.
Bei Konstruktionen mit zwei gegenläufig drehen Hauptrotoren, entsteht kein Drehmoment auf den Rumpf, resp. die Drehmomente der beiden Rotoren heben sich gegenseitig auf.
Der Helikopter im Schwebeflug



Auftrieb
Gegenüber den Flächenflugzeugen können die Helikopter vorwärts, seitwärts und rückwärts fliegen, können aber auch in der Luft stehen bleiben. Dies ist möglich, da die Hauptrotorblätter, wegen der Rotation immer durch die Luft angeströmt werden und dadurch den notwendigen Auftrieb liefern. Ein Flächenflugzeug erzeugt den Auftrieb erst, wenn eine genügend hohe Vorwärtsgeschwindigkeit erreicht ist.
Im Schwebeflug werden wir, der Einfachheit halber, den Rotor als eine Scheibe betrachten und nicht die Verhältnisse am einzelnen Rotorblatt untersuchen. Dies ist möglich, da die aerodynamischen Kräfte einigermassen symmetrisch, über die gesamte Rotorscheibe verteilt sind.
Damit sich ein Helikopter in der Luft halten kann, muss der Auftrieb genau gleich gross, wie sein Gewicht sein (Abb. 8).
Anstellwinkel
Wird nun bei allen Rotorblättern mit der kollektiven Blattverstellung gleichzeitig der Anstellwinkel erhöht, wird der Luftdurchsatz von oben nach unten durch die Rotorscheibe grösser, der Auftrieb nimmt zu und der Helikopter beginnt an Ort zu steigen (Abb. 9).
Reduziert man den Anstellwinkel wird der Gesamtauftrieb kleiner, und der Helikopter beginnt sinngemäss zu sinken (Abb. 10).


Drehung des Hauptrotors
Wegen der Drehung des Hauptrotors entsteht ein Moment, welches bewirkt, dass sich der Rumpf entgegen der Drehrichtung des Hauptrotors dreht. Diese ungewollte Drehung wird durch den senkrecht stehenden Heckrotor korrigiert (Abb. 11). Je grösser die Leistung des Hauptrotors ist, desto grösser ist auch das Drehmoment, und entsprechend mehr muss der Heckrotor leisten, um das Drehmoment zu korrigieren.
Da der Heckrotor einen bestimmten horizontalen Schub produziert, hat der Helikopter die Tendenz sich in die entsprechende Richtung zu verschieben. Die Richtung ist abhängig von der Drehrichtung des Hauptrotors.
Stationärer Schwebeflug durch seitliches Versetzen
Dieses seitliche Versetzen muss wiederum mit dem Hauptrotor korrigiert werden. Der Luftstrom, auch Downwash genannt, wird leicht entgegen der Verschieberichtung geleitet, wodurch der Helikopter im stationären Schwebeflug bleibt.


Schwebeflug ausserhalb Bodeneffekt
Die Kräfte des Haupt- und Heckrotors wirken bei vielen Helikopter nicht in der gleichen horizontalen Ebene. Aus diesem Grund kann es sein, dass der Helikopter im Schwebeflug nicht horizontal, sondern mit einer leichten Querlage da steht. Ob die Querlage links oder rechts ist, hängt primär wieder von der Drehrichtung des Hauptrotors ab (Abb. 12).
Der Schwebeflug benötigt in der Regel mehr Leistung als der Vorwärtsflug. Eine wesentliche Rolle für die Leistungsfähigkeit spielt vor allem die Luftdichte. Je dichter die Luft, desto weniger muss der Antrieb leisten und desto mehr Gewicht kann der Helikopter tragen. Da mit zunehmender Flughöhe die Luftdichte abnimmt, muss das Gewicht des Helikopters reduziert werden, um ihn im Schwebeflug halten zu können. Grundsätzlich kann gesagt werden, je grösser die Aussentemperatur und je höher die Flughöhe ist, desto kleiner ist die Leistungsfähigkeit des Helikopter.
Einen weiteren Einfluss auf die Leistung hat der Downwash. Kann der Luftstrom ungehindert abfliessen, nennt man diesen Zustand Schwebeflug ausserhalb Bodeneffekt (hover out of ground effect, OGE) (Abb. 13).
Luftkissen - für den stationären Schwebeflug
Schwebt der Helikopter in der Nähe des Bodens, nennt man dies Schwebeflug im Bodeneffekt (hover in ground effect, IGE). Durch den Downwash, welcher zur Seite abgeleitet werden muss, entsteht eine Art Luftkissen (Abb. 14). Dadurch benötigt der Helikopter weniger Leistung für den stationären Schwebeflug.
Je höher der Helikopter über dem Boden schwebt, desto kleiner ist der Einfluss des Bodeneffekts. Bei einer Schwebehöhe von ca. 1.5x dem Rotordurchmesser ist kein Bodeneffekt mehr vorhanden. Einen grossen Einfluss auf den Bodeneffekt hat auch die Bodenbeschaffenheit und vor allem die Neigung des Geländes. Je stärker der Boden geneigt ist, desto besser kann der Downwash abfliessen und desto geringer ist der Bodeneffekt.
Der Helikopter im Vorwärtsflug


Vorwärtsflug
Der wohl grösste Vorteil der Helikopter liegt darin, dass sie sowohl schweben, als auch vorwärts fliegen können. Der Übergang vom Schwebe- in den Vorwärtsflug wird als so genannte Transition bezeichnet und ist ein aerodynamisch wie auch mechanisch äusserst komplizierter Vorgang. Der Einfachheit halber werden wir den Rotor als eine Scheibe und nicht die aerodynamischen Verhältnisse am einzelnen Rotorblatt betrachten.
Wie bereits erwähnt, wird die Luft im Schwebeflug von oben nach unten durch den Rotor beschleunigt (Abb. 15). Damit der Helikopter in den Vorwärtsflug übergeht, muss die gesamte Rotorscheibe nach vorne geneigt werden.
Neigung
Durch die Neigung nach vorne wird die Luft nicht mehr senkrecht nach unten, sondern nach hinten beschleunigt (Abb. 16). Dadurch beginnt sich der Helikopter nach vorne zu bewegen. Da aber auch der Auftrieb nicht mehr senkrecht nach oben wirkt, muss die Leistung durch den Piloten in der Startphase leicht erhöht werden, um das richtige Verhältnis zwischen Auftrieb und Gewicht zu erreichen.



Anströmgeschwindigkeiten
Durch die Rotation des Rotors entstehen im Vorwärtsflug unterschiedliche Anströmgeschwindigkeiten an den Rotorblättern. Das Rotorblatt, welches sich in Flugrichtung gesehen nach vorne bewegt wird als vorlaufendes Blatt, dasjenige welches sich nach hinten bewegt als rücklaufendes Blatt bezeichnet (Abb. 17).
Geschwindigkeit vorlaufendes Blatt
Die Anströmgeschwindigkeit ist abhängig von der Vorwärtsgeschwindigkeit, der Rotordrehzahl und dem Rotordurchmesser. Gehen wir davon aus, dass sich der Helikopter mit einer Geschwindigkeit von 200 km/h vorwärts bewegt und eine Blattspitzengeschwindigkeit von 750 km/h aufweist, entstehen folgende Verhältnisse am Rotor:
Das vorlaufende Blatt erreicht eine effektive Geschwindigkeit an der Blattspitze von 950 km/h (750 + 200). Diese Geschwindigkeit befindet sich bereits sehr nahe an der Schallgeschwindigkeit. An der Blattwurzel wird immer noch eine Anströmung mit über 200 km/h erreicht (Abb. 18).
Geschwindigkeit rücklaufendes Blatt
Das rücklaufende Blatt wird nur noch mit einer Geschwindigkeit von 550 km/h an der Blattspitze angeströmt (750 - 200). Die Anströmgeschwindigkeit nimmt ab, je näher man sich dem Rotationszentrum befindet. In der Gegend der Blattwurzel kann das Blatt sogar von hinten angeströmt werden und liefert demzufolge in diesem Bereich keinen Auftrieb mehr (Abb. 19).
Der Auftrieb ist bekannter Weise von der Anströmgeschwindigkeit und dem Anstellwinkel (nebst der Art des Profils) abhängig. Um einigermassen konstante Auftriebsverhältnisse über die gesamte Rotorscheibe zu erreichen, muss der Anstellwinkel während dem Umlauf des Blattes konstant verändert werden, da sich die Anströmgeschwindigkeit ja auch konstant ändert. Diese Verstellung des Anstellwinkels wird als zyklische Blattverstellung bezeichnet.
Die Grenzen im Vorwärtsflug liegen bei heutigen Helikopter bei ca. 400 km/h. Über dieser Geschwindigkeit würden sich grosse Teile des vorlaufenden Blattes im Überschallbereich und ein grosser Bereich des rücklaufenden Blattes im Strömungsabriss befinden. Es gibt kein Flügelprofil, welches einen solch grossen Geschwindigkeitsbereich abdecken könnte.
Die Autorotation
Um die Anströmung am Rotorblatt sicherzustellen, muss der Rotor immer angetrieben werden. Was geschieht aber wenn der Antrieb - aus welchen Gründen auch immer - ausfällt?
Da die Rotorblätter im Vorwärtsflug durch die kollektive Blattverstellung einen relativ grossen Anstellwinkel aufweisen und dadurch auch einen entsprechend grossen Luftwiderstand produzieren, fällt die Drehzahl des Rotors ohne Antrieb rapid ab. Dadurch geht selbstverständlich auch der notwendige Auftrieb verloren und der Helikopter stürzt innerhalb kurzer Zeit ab.
Das tönt zum Glück nur viel dramatischer als es in Wirklichkeit ist. Was bei einem Flächenflugzeug der Gleitflug ist, ist beim Helikopter die Autorotation. Fällt bei einem Helikopter während dem Flug der Antrieb aus, wird der Pilot sofort den kollektiven Blatteinstellwinkel verringern und der Helikopter beginnt zu sinken. Gleichzeitig wird, bedingt durch den kleineren Anstellwinkel der Luftwiderstand an den Rotorblättern wesentlich verringert.
Aerodynamische Verhältnisse
Wie wir in Abb. 20 sehen können, wird der Rotor nun nicht mehr von oben nach unten, sondern von unten nach oben durchströmt. Durch die aerodynamischen Verhältnisse, welche wir noch etwas detaillierter betrachten werden, kann in diesem Zustand die Rotordrehzahl konstant gehalten werden. Um die Vorgänge in der Autorotation zu erklären, dürfen wir nicht wie bisher den Rotor als Scheibe betrachten, sondern müssen die Verhältnisse am einzelnen Rotorblatt untersuchen. Und dazu schauen wir zuerst den Zustand im angetriebenen Vorwärtsflug an (Abb. 21).


Senkrechten Sinkflug
Bei einem Flugprofil wirkt der Auftrieb immer senkrecht zur Anströmung und der Luftwiderstand in der gleichen Ebene wie die Anströmung. Da bei einem Helikopter die Anströmung aus einer horizontalen (Drehung des Rotors) und einer vertikalen Komponente (Luftdurchsatz von oben oder unten) besteht, sprechen wir beim Rotorblatt von einer relativen Anströmung. Da sich das Rotorblatt nach aussen hin mit einer grösseren Geschwindigkeit bewegt, die vertikale Komponente aber mehr oder weniger konstant bliebt, ändert sich die relative Anströmung konstant über die ganze Länge des Rotorblattes. Aus diesem Grund gilt die Abb. 21 nur für einen kleinen Bereich am Rotorblatt. Auch der Anstellwinkel (Winkel zwischen der Profilsehne und der relativen Anströmung) ändert sich über die Länge des Rotorblattes und zwar nimmt der Anstellwinkel nach aussen hin ab.
In der Autoration kann der Rotor in drei Bereiche unterteilt werden. Der Einfachheit halber schauen wir zuerst die senkrechte Autoration an, das heisst der Helikopter befindet sich im senkrechten Sinkflug (Abb. 22).
Senkrechte Autorotation
In der senkrechten Autorotation sind die Bereiche symmetrisch über die Rotorscheibe verteilt. Dabei ist nur der antreibende Bereich für die Drehung des Rotors verantwortlich. In der Nähe des Zentrums ist die Anströmgeschwindigkeit so klein, dass sich die Rotorblätter im Strömungsabriss befinden.
Um zu erklären wie diese Bereiche zustande kommen müssen wir die aerodynamischen Verhältnisse am einzelnen Rotorblatt etwas genauer untersuchen.
Im antreibenden Bereich liegen die aerodynamischen Gesamtkräfte vor der Rotationsachse des Rotors. Dadurch ergibt sich eine Kraft welche den Rotor antreibt (Abb. 23).
Liegen die aerodynamischen Kräfte genau auf der Rotationsachse bleibt die Drehgeschwindigkeit konstant (Abb. 24).
Im bremsenden Teil liegen die Gesamtkräfte hinter der Rotationsachse, was bedeutet dass der Rotor abgebremst wird (Abb. 25).
Gleichgewicht
Alle Helikopter sind so konstruiert, dass sich ein Gleichgewicht zwischen dem antreibenden und dem bremsenden Teil ergibt. Dieses Gleichgewicht muss vom senkrechten Sinkflug bis zu einer bestimmten Vorwärtsgeschwindigkeit sichergestellt sein. Einige Helikopter sind während der Autorotation in der maximalen Vorwärtsgeschwindigkeit eingeschränkt. Das kommt daher, weil sich der antreibende Teil mit zunehmender Geschwindigkeit verschiebt (Abb. 26). Diese Verschiebung erfolgt immer in Richtung des rücklaufenden Blattes.
Wird die Vorwärtsgeschwindigkeit in dieser Situation nochmals erhöht, verschiebt sich der antreibende Bereich weiter nach rechts, was schlussendlich dazu führt, dass der bremsende Teil grösser als der antreibende wird und dadurch die Rotordrehzahl nicht mehr konstant gehalten werden kann.
In der Regel wird eine Autorotation immer mit einer bestimmten Vorwärtsgeschwindigkeit geflogen. Um eine sichere Landung sicherzustellen muss diese Geschwindigkeit soweit möglich reduziert werden. Dies wird mit dem so genannten Flare erreicht. Kurz über dem Boden nimmt der Pilot die Nase nach oben, wodurch das Sinken reduziert wird und die Geschwindigkeit abnimmt. Durch dieses Abbremsen kann vom Rotor noch mehr Energie aufgenommen werden (die Drehzahl wird erhöht) und der Helikopter kann eine fast normale Landung durchführen. Dies tönt sehr einfach, ist aber für den Piloten ein anspruchsvolles Manöver.





Der Vortex
Luftdurchsatz Schwebeflug
Während dem stabilen Schwebeflug wird wie bereits beschrieben die Luft von oben nach unten durch den Rotor beschleunigt. Der Luftdurchsatz ist über die Länge des Rotorblattes nicht konstant (Abb. 27).
Wirbelringzustand oder Vortex
Der Vortex oder Wirbelringzustand entsteht bei einem Helikopter wenn sich dieser im Schwebeflug oder langsamen Vorwärtsflug, mit einer grossen Sinkgeschwindigkeit befindet. Die Sinkgeschwindigkeit muss sich in einem Bereich von mehr als 500 ft/min (2,5 m/sec) und die Vorwärtsgeschwindigkeit unterhalb der so genannten Transitionszone befinden. Zusätzlich muss der Rotor durch den Antrieb angetrieben werden. Diese Verhältnisse sind vor allem während einem steilen Landeanflug mit Rückenwind gegeben.
Durch die Sinkgeschwindigkeit entsteht ein Luftströmung welche dem Downwash entgegen wirkt (Abb 28).
Vortex
Dadurch wird im inneren Bereich der Rotorebene die Luft zwar von oben nach unten beschleunigt, aber durch die Luftströmung von unten gleich wieder zurück nach oben befördert (Abb. 29).



Wirbelringzustand
Die Luft wird erneut von oben angesogen und so entsteht ein in sich geschlossenes System, der Vortex oder Wirbelringzustand (Abb. 30). In diesem Zustand beginnt der Helikopter noch stärker zu sinken, auch wenn die Leistung erhöht wird. Zwar ist der Helikopter nach wie vor steuerbar, aber es treten zum Teil starke Vibrationen auf.
Der Vortex kann grundsätzlich auf zwei Arten beendet werden:Bei der ersten Möglichkeit geht man in den Vorwärtsflug über, da der Downwash im Vorwärtsflug nach hinten abgeleitet wird, kann dadurch der Rotor mit "neuer Luft" von oben versorgt werden. Diese Variante muss angewendet werden, wenn der Vortex in Bodennähe, beispielsweise während einem Landeanflug auftritt.
Als zweite Möglichkeit kann man in die Autoration übergehen, wodurch der Luftdurchsatz von oben nach unten fehlt und der Rotor nur noch von unten nach oben durchströmt wird (wie bei einer normalen Autoration).
In jedem Fall muss der Pilot beim Auftreten des Vortex sehr schnell reagieren, da durch die enorme Sinkgeschwindigkeit die Flughöhe unter Umständen zu gering ist, um den Vortex zu beenden.

3. Steuerung eines Helikopters
Die Grundlagen der Steuerung
Ein Helikopter wird mit drei unterschiedlichen Steuern gesteuert. Der Steuerknüppel, oder auch Cyclic genannt wird im Schwebeflug verwendet um den Helikopter nach links, rechts, vorne oder hinten zu bewegen. Im Vorwärtsflug werden durch den Cyclic die Kurven oder das Steigen und Sinken eingeleitet. Mit den Pedalen kann der Helikopter um die Hochachse an Ort gedreht werden, und mit dem Collective steuert der Pilot das Steigen und Sinken im Schwebeflug, und zusammen mit dem Cyclic die Geschwindigkeit im Vorwärtsflug (Abb. 1).

Einstellwinkel Rotorblätter
Bei jedem Helikopter wird der Steuerknüppel mit der rechten Hand und der Collective mit der Linken bedient. Die Füsse werden gebraucht um über die Pedale den Heckrotor zu steuern. Wegen der Instabilität eines Helikopter darf der Cyclic im Flug nicht losgelassen werden, es sei denn der Heli ist mit einem automatischen Stabilisierungssystem ausgerüstet.
Mit den Steuerorganen (Cyclic, Collective und Pedals) wird der Einstellwinkel an den Hauptrotor-, resp. Heckrotorblätter mechanisch verstellt. Der Einstellwinkel ist der Winkel zwischen einer definierten Linie am Helikopter und der Anstellung des Rotorblattprofils. Der Anstellwinkel dagegen, ist der Winkel zwischen dem Rotorblattprofil und der anströmenden Luft. Das bedeutet, dass mit der Verstellung des Einstellwinkels über die Steuerung, ebenfalls der Anstellwinkel und somit der Auftrieb verändert wird.
Sobald der Pilot am Collective nach oben zieht, wird der Einstellwinkel (und dadurch der Anstellwinkel) aller Rotorblätter um den gleichen Betrag erhöht. Dadurch nimmt der Gesamtauftrieb zu und der Helikopter beginnt zu steigen. Sinngemäss verringert sich der Einstellwinkel, wenn der Pilot den Collective nach unten drückt. (Abb. 2)
Wird der Cyclic nach vorne gedrückt, wird der Einstellwinkel der Rotorblätter während einer Umdrehung kontinuierlich geändert. Durch den unterschiedlichen Auftrieb wird die Rotorblattebene nach vorne geneigt. Selbstverständlich neigt sich die Ebene nach hinten, sobald der Pilot den Cyclic nach hinten zieht. (Abb. 3)
Dasselbe wie oben beschrieben geschieht, wenn der Pilot den Cyclic entweder nach rechts oder nach links drückt. (Abb. 4)
Mit den Pedalen wird der Einstellwinkel aller Heckrotorblätter um den gleichen Betrag verstellt (ähnlich der Collectiven Blattverstellung am Hauptrotor). Dadurch erhöht oder verringert sich der Heckrotorschub. (Abb. 5)
Die ganze Sache mit der Steuerung hat nur einen kleinen Haken. Sobald der Pilot an einem der drei Steuer etwas verändert, muss er an den beiden Anderen ebenfalls korrigieren. Wie wir wissen, muss der Pilot am Collective ziehen wenn er im Schwebeflug etwas steigen will. Dies bewirkt nun, dass durch den grösseren Anstellwinkel der Rotorblätter (und dadurch erhöhter Luftwiderstand) das Drehmoment zunimmt. Dadurch beginnt sich der Hubschrauber um die Hochachse zu drehen, was nur mit einer Korrektur am Heckrotor verhindert werden kann. Da nun der Heckrotor einen grösseren seitlichen Schub liefert, wird auch die seitliche Versetzung des Helikopters vergrössert, was wiederum nur mit einer Korrektur am Cyclic ausgeglichen werden kann. Man könnte meinen, dass sich der Helikopter nun in einem stabilen Schwebeflug befindet. Dem ist leider nicht so!! Wegen den äusseren Einflüssen (vor allem Wind) und den nicht konstanten Verwirbelungen rund um den Helikopter muss der Pilot immer an allen Steuern korrigieren um einen stabilen Schwebeflug zu halten. Die grosse Schwierigkeit besteht darin all diese kleinen Korrekturen richtig zu koordinieren. Erst wenn ein Pilotenschüler nicht mehr studieren muss an welchem Steuer er nun korrigieren soll, kann er den Helikopter in einem mehr oder weniger stabilen Schwebeflug halten. Und um diesen Automatismus ein zu trainieren braucht es einige Zeit (und einige Schweisstropfen).




Die Technik der Steuerung
Die Steuerung eines Helikopters wird über Steuerstangen, Umlenkhebel und Steuerseile, von den Steuerorganen auf die Taumelscheibe (resp. zum Heckrotor) sichergestellt (Abb. 6).
Taumelscheibe
Das wichtigste Element der Steuerung eines Helikopters ist die Taumelscheibe. Sie liegt auf der Rotorachse, direkt unter dem Hauptrotor und ist zuständig für die Übertragung der Steuerimpulse auf die einzelnen Rotorblätter. Grundsätzlich besteht die Taumelscheibe aus zwei Teilen, dem fixen und dem drehenden Teil. Der fixe oder untere Teil ist über Steuerstangen und Umlenkhebel mit dem Steuerknüppel verbunden und der drehende oder obere Teil mit jedem einzelnen Rotorblatt. Wird nun die Taumelscheibe mit dem Steuerknüppel nach vorne oder zur Seite geneigt, ändert sich der Einstellwinkel jedes Rotorblattes während einer Umdrehung (zyklische Blattverstellung). Wenn der Pilot am Collective nach oben zieht, bewegt sich die Taumelscheibe als Ganzes nach oben und der Einstellwinkel aller Rotorblätter wird gleichzeitig erhöht (kollektive Blattverstellung). Dieses Prinzip funktioniert unabhängig von der Anzahl Rotorblätter des Helikopters (Abb. 7).
Die Steuerung wird bei kleineren Helikoptern in der Regel mit hydraulischen Servomotoren unterstützt, um den Kraftaufwand für den Piloten zu verringern. Bei mittleren und grossen Helikoptern treten an der Taumelscheibe so grosse Kräfte auf, dass eine rein mechanische Steuerung (nur mit Steuerstangen und Umlenkhebel) nicht mehr möglich ist, und die Steuerung nur mit hydraulischer Unterstützung gewährleistet werden kann.Die Steuerung des Heckrotors funktioniert grundsätzlich gleich. Der wesentliche Unterschied besteht darin, dass nur die kollektive Blattverstellung gebraucht wird. Die Pedale im Cockpit sind über Steuerstangen Umlenkhebel und Steuerseile mit der so genannten Spinne verbunden. Die Spinne überträgt die Steuerimpulse auf die einzelnen Heckrotorblätter, ähnlich wie die Taumelscheibe am Hauptrotor. Auch hier gilt, je grösser der Hubschrauber, desto grösser sind die Steuerkräfte am Heckrotor und desto mehr muss die Steuerung mit hydraulischen Hilfsmitteln unterstützt werden (Abb. 8).



NOTAR
Das NOTAR Prinzip
Beim NOTAR (NO TAil Rotor) handelt es sich um einen Helikopter mit einem Hauptrotor aber ohne Heckrotor. Dieses Verfahren wurde von McDonnell Douglas (MD-Helicopters) entwickelt und patentiert. Der grosse Vorteil dieses Systems liegt darin, dass keine Gefährdung durch den drehenden Heckrotor vorhanden ist. Weiter wird der Lärmpegel des Helikopters wesentlich verringert. Bei einem konventionellen Hubschrauber wird ein Grossteil des Lärms durch den Heckrotor verursacht.
Das Prinzip des NOTARs ist eigentlich ganz einfach. Ein Teil des Hauptrotorabwindes wird in den Heckausleger geleitet und dort mit einem Fan weiter verdichtet. Die Luft strömt nun durch den Heckausleger und entweicht am Ende durch schwenkbare Düsen. Diese Düsen werden durch die Pedale gesteuert und erlauben den Ausgleich des Drehmomentes und die Drehung des Helikopters um die Hochachse (Abb. 9).
Unterstützt wird diese Wirkung durch die spezielle Form und weitere Auslassdüsen entlang dem Heckausleger. Durch die, nur auf einer Seite ausströmende Luft wird der Downwash zur Seite abgelenkt und beschleunigt. Dadurch wird ein seitlicher aerodynamischer Auftrieb erzeugt (Abb. 10). Mit diesem kleinen Trick kann man auch mit einem runden Körper die Wirkung eines normalen Flügelprofiles erreichen.
Dieses System wird vor allem für die Steuerung im Schwebe- und langsamen Vorwärtsflug verwendet. Im schnellen Vorwärtsflug wird der Helikopter über senkrecht angeordnete Seitenruder in der Hochachse gesteuert.
Die Steuerung um die Hochachse ist auch in der Autorotation voll funktionsfähig, da der Fan welcher den notwendigen Luftdurchsatz im Heckausleger erzeugt, mechanisch mit dem Hauptgetriebe verbunden ist.
Mit freundlicher Genehmigung von hubschrauber.li



